溫州禮品袋定制服務 紙袋制作、購物袋價格及企業形象設計
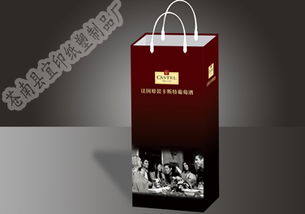
溫州作為中國重要的制造業基地,擁有眾多專業的定制禮品袋和紙袋制作廠家。這些企業專注于生產各種規格的紙袋、購物袋和禮品包裝,并提供定制服務,包括材質選擇、尺寸設計、印刷圖案等,以滿足客戶多樣化的需求。
在價格方面,定制購物袋的費用受多種因素影響,如材質(如牛皮紙、銅版紙或環保材料)、尺寸、印刷工藝(絲印、膠印或燙金)和訂單數量。通常,小批量定制單價較高,而大批量生產可享受優惠。建議直接聯系廠家獲取詳細報價,許多溫州廠家提供在線咨詢和免費樣品服務,方便客戶比較選擇。
這些廠家還提供企業形象設計服務,將品牌標識、顏色和口號融入袋身設計,幫助提升品牌辨識度。通過專業設計師的協助,企業可以打造獨特的包裝解決方案,強化市場形象。例如,使用高質量圖片和樣品展示,客戶能直觀評估成品效果。溫州定制禮品袋廠家以專業、高效和個性化服務,助力企業在競爭中脫穎而出。
如若轉載,請注明出處:http://www.65kcs.cn/product/14.html
更新時間:2026-05-27 16:43:36